El-manipülatör kendi elleriyle: nasıl yapılır?
Manipülatör kolunun nasıl yapıldığına bakacağızendüstriyel tasarımlarda kendi elleriyle. İlk önce, genel sorulara, sonra sonucun teknik özelliklerine, ayrıntılara ve son olarak montaj sürecinin kendisine değinilecektir.
Genel olarak ve genel

Sonucun teknik özellikleri
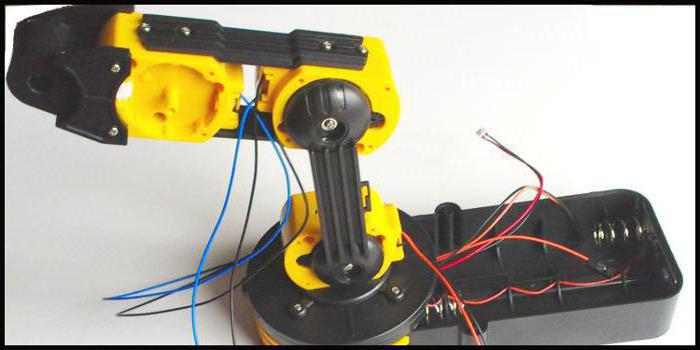
Parametreli bir örnek dikkate alınacaktıruzunluk / yükseklik / genişlik sırasıyla 228/380/160 milimetre. Elle yapılan manipülatör kolunun ağırlığı yaklaşık 1 kilogram olacaktır. Kablolu bir uzaktan kumanda, kontrol için kullanılır. Deneyim varlığında yaklaşık montaj süresi yaklaşık 6-8 saattir. Eğer değilse, o zaman günler, haftalar uzaklaşabilir ve elle-manipülatörün montajı için aylar ve aylar olabilir. Kişinin elleri ve bu gibi durumlarda, sadece kendi ilginiz için yapmaya değer. Bileşenlerin hareketi için toplayıcı motorlar kullanılır. Yeterince çaba ile, 360 derece dönecek bir cihaz yapabilirsiniz. Ayrıca, çalışma kolaylığı için, havya ve lehim gibi standart araçların yanı sıra, stoklanması gereklidir:
- Geniş pense.
- Yanal nipeller.
- Bir çapraz tornavida.
- D tipi 4 adet pil
Uzaktan kumanda olabilirdüğmeleri ve mikrodenetleyici kullanarak gerçekleştirin. Uzaktan kablosuz kontrol yapmak isterseniz, el kumandasında aksiyon kontrol elemanı da gereklidir. Ek olarak, devrenin stabilize edilmesine ve gerekli zamanda gerekli büyüklükte akımın iletilmesine imkan veren sadece cihazlar (kapasitörler, dirençler, transistörler) gerekli olacaktır.
Küçük ayrıntılar

Ayrıca, tellerin sağlam olduğundan emin olunmalıdır.hareketi zorlaştırmadı. bünyesinde en uygun rota onları olacaktır. Ve bu, her şeyi dışında yapabileceği böyle bir yaklaşımın zaman kazandıracak, ama potansiyel olarak bireysel birimleri veya cihazın tamamını hareketli zorluklara yol açabilir. Ve şimdi: nasıl bir manipülatör yapmak?
Genel olarak Meclis

- İki motorun montajı. Her biri belirli bir yöne dönmekten sorumlu olacak. Biri işe yaradığında, ikincisi dinleniyor.
- Bir motoru, her iki yönde de döndürülebilen bir devre ile monte etmek.
Seçebileceğiniz seçeneklerden hangisisadece sizden. Sonra temel inşaat yapılır. İşin rahatı için iki "eklem" e ihtiyacınız var. Platforma bağlı olarak, tabanına yerleştirilen motorların yardımı ile çözülen farklı yönlere eğilebilir. Dirsek kıvrımının yerine başka bir veya bir çift yerleştirilmelidir, böylece kavrayıcının bir kısmı koordinat sisteminin yatay ve dikey çizgileri boyunca hareket ettirilebilir. Ayrıca, mümkün olan en yüksek seviyeyi elde etmek istiyorsanız, bileğin yerine başka bir motor takabilirsiniz. Dahası, en gerekli olan, el manipülatörünün gösterilmediği. Yakalama cihazını kendi ellerimizle yapmalıyız. Uygulama için birçok seçenek var. En popüler ikiye rehberlik edebilirsiniz:
- Sadece iki parmak kullanılır.Aynı anda kavrama nesnesini sıkıştırır ve sıkıştırır. Bununla birlikte, genellikle, önemli bir yük kapasitesine sahip olamayan en basit uygulamadır.
- İnsan elinin bir prototipi yaratılıyor. Burada, tüm parmaklar için, bükme / bükme işleminin gerçekleştirileceği bir motor kullanılabilir. Ancak tasarımı daha zor hale getirebilirsiniz. Böylece, motordaki her parmağa bağlanabilir ve bunları ayrı ayrı yönetebilirsiniz.
Sonra uzaktan kumanda ilebireysel motorları ve çalışmalarının hızını etkileyecek. Ve kendi elleriyle yapılmış bir robot kolu kullanarak deneylere başlayabilirsiniz.
Sonucun olası şematik görüntüleri

Sunulan herhangi bir manipülatör devresi geliştirilebilir.
Sonuç